News
Workshop "Problems of the optimal control of mobile robots" (A.A. Ardentov)
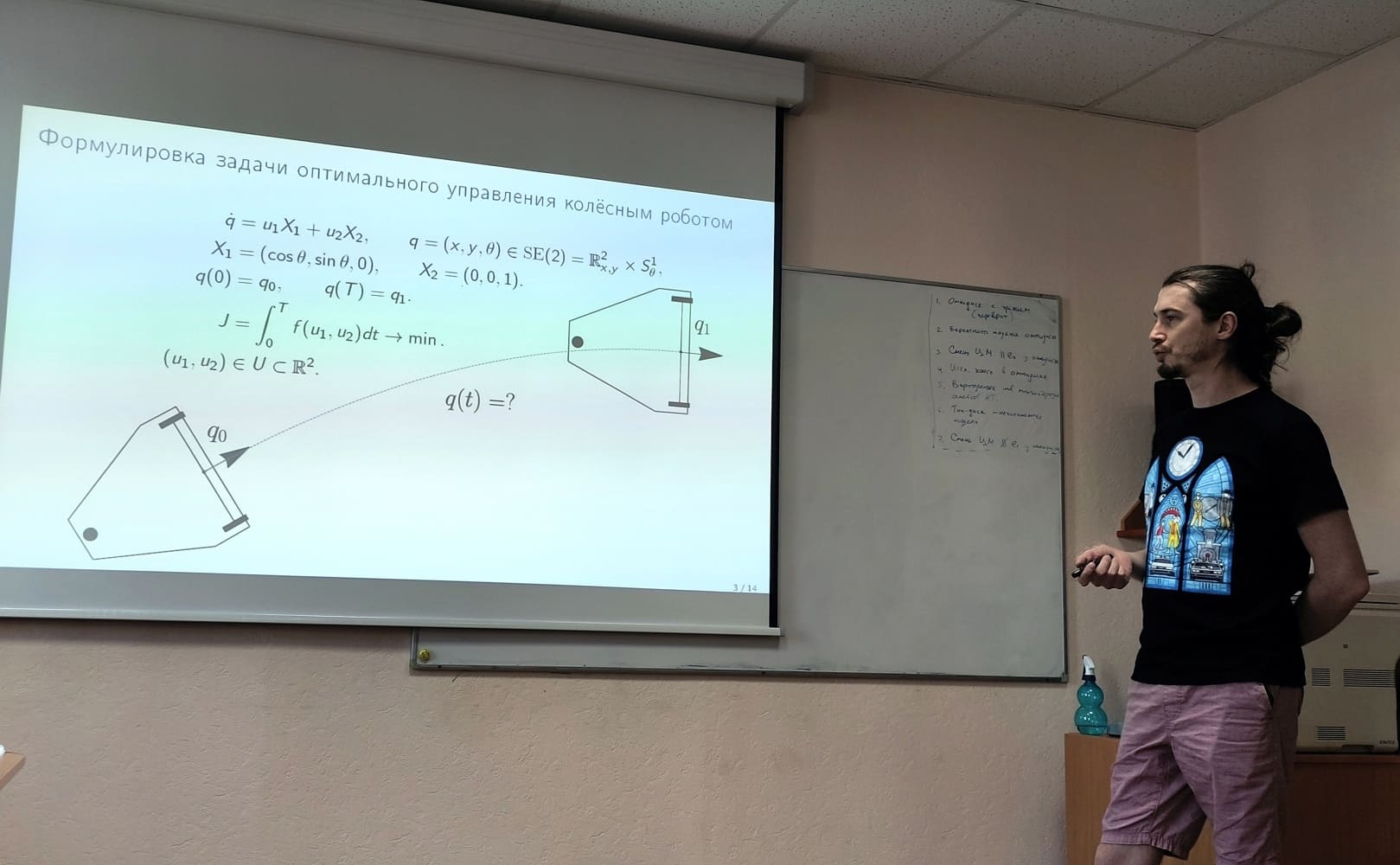
From July 18 through July 20, a workshop on the geometric theory of optimal control was held in the Ural Mathematical Center at the Udmurt State University. Andrey Andreyevich Ardentov, Candidate of Sciences in Technology, senior research worker at the Ailamazyan Program Systems Institute, Russian Academy of Sciences, gave a talk entitled “Problems of the Optimal Control of Mobile Robots", a topic developed under Grant No. 22-21-00877 of the Russian Science Foundation.
A.A. Ardentov presented a model of a wheeled robot moving on a plane (without obstacles) only forward.

The workshop addressed various aspects of the optimal control of mobile robots, including optimization methods and algorithms, modeling and analysis of control systems. Practical examples were given and open problems presented.
The workshop was supported by the Ministry of Science and Higher Education of the Russian Federation (Agreement No. 075-02-2023-933).